[toc]
Course Introduction
Welcome to the Course - 3 min
1. What is motion planning?
the motion planning problem is the task of generating the path and velocities required to get the autonomous car from point A to point B.
2. decompose the motion planning into smaller sub-problems
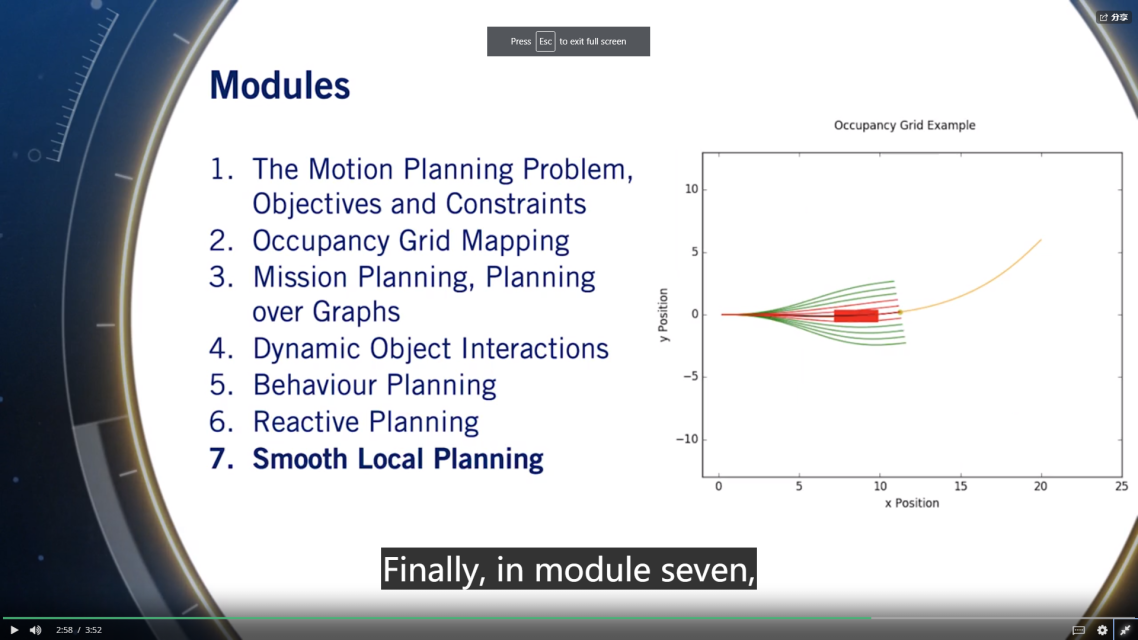
Module 1: The Planning Problem
Lesson 1: Driving Missions, Scenarios, and Behaviour
关键概念
- Explain what the autonomous driving high-level mission entails.
navigate from current position to a destination. - Recall the set of important basic driving scenarios.
road structure (turns, lane changes) , obstacles - Develop a set of driving behaviours to handle most basic driving scenarios.
Speed Tracking, Decelerate to Stop, Stay Stopped, Yield, Emergency Stop - Recognize important constraints for autonomous driving motion planning.
- Explain the functionality of each step in a hierarchical motion planner.
- List some variants of each step of a hierarchical motion planner.
- The motion planning problem is the task of navigating the ego vehicle to its destination in a safe and comfortable manner while following the rules of the road.
Autonomous Driving Mission:目标找出最高效的路
为了更高效,抽象了许多底层的变量,但是这些底层的很重要定义了不同的驾驶场景
Road Structure Scenario:
- 保持车道lane maintenance,目标偏离中心线最小 但要保证速度
- 变道lane change
- 转弯
- 掉头U-turn
Obstacle Scenarios
- static
- dynamic:Different dynamic obstacles in the scenario have different characteristics and behaviours
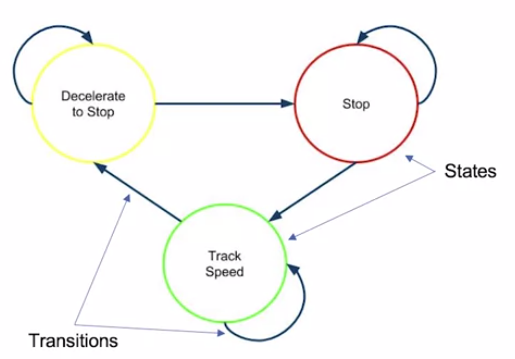
Behavior
- Speed Tracking
- Decelerate to Stop
- Stay Stopped
- Yield
- Emergency Stop
(Not an exhaustive list)
Challenges
- 许多违反交规的行为难以预测
Hierarchical Planning Introduction
- motion planning是一个复杂问题,将其分层优化,如下图
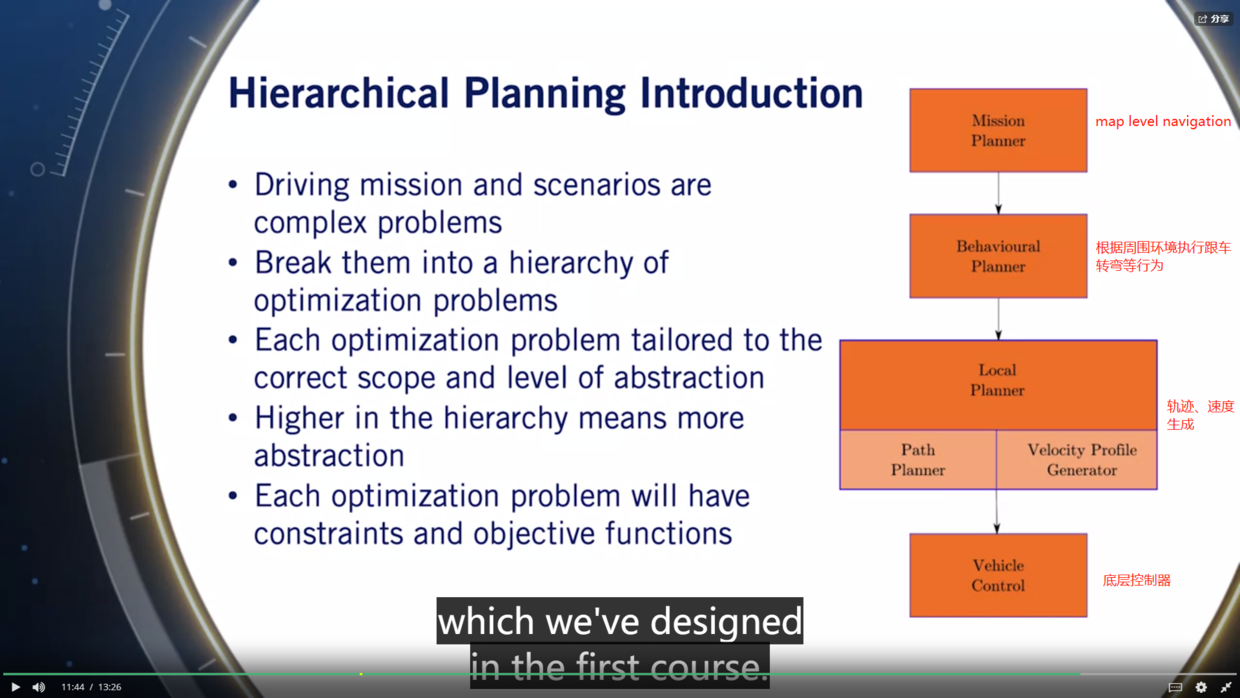
每一个子优化问题有自己的目标和限制
Lesson 2: Motion Planning Constraint

Bicycle Model
-
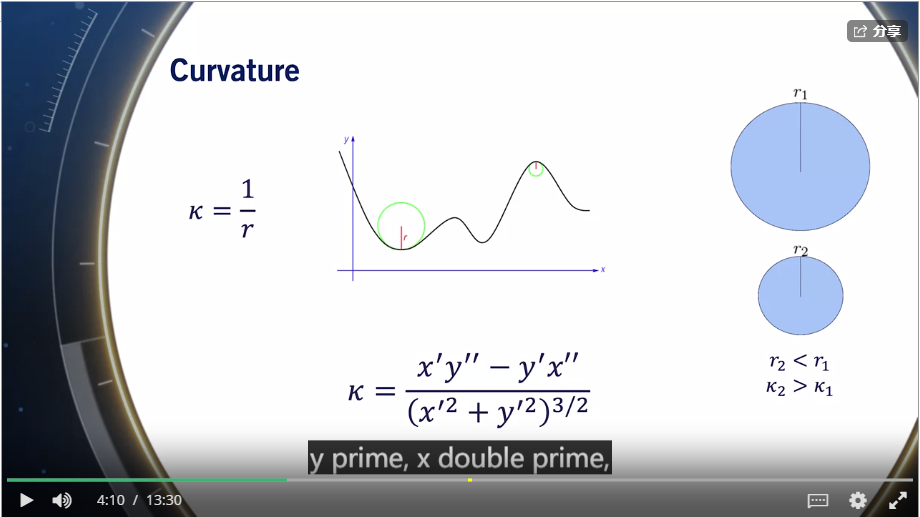
路径上的曲率要注意最大曲率限制
-
是一个non-holonomic约束(不仅取决于当前状态,也取决于如何到达该状态)
通俗地讲, holonomic constraint是configuration space上的约束,它告诉你哪里不能走, nonholonomic constraint是速度(广义坐标的微分)上的约束,它告诉你哪些方向不能走,但是你依然能想去哪里去哪里。
-
曲率计算:
Vehicle Dynamics
- 横向和纵向的加速限制(摩擦力椭圆)
- 在非紧急情况下,更有用的限制是乘客对加速度的容忍度(下图矩形所示)
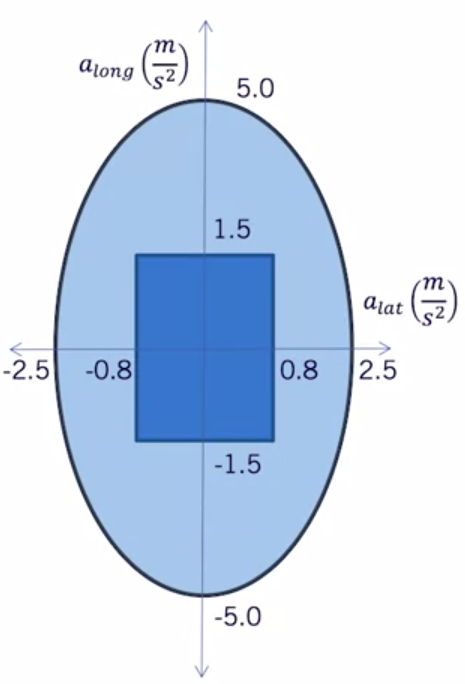
因此速度受限于加速度和曲率
Static obstacles
- 使用线束或一系列近似车身的圆去做碰撞检测
Dynamic Obstacles
- 涉及到障碍物行为的预测。如果预测所有,就太过保守无意义,做aggressive和conservative之前的tradeoff——热点研究
Rules of the road and regulatory elements
-
车道线和一些标识
-
time gap
the amount of time that it would take for the ego vehicle to reach the leading vehicles current position while traveling at the ego vehicle’s current speed
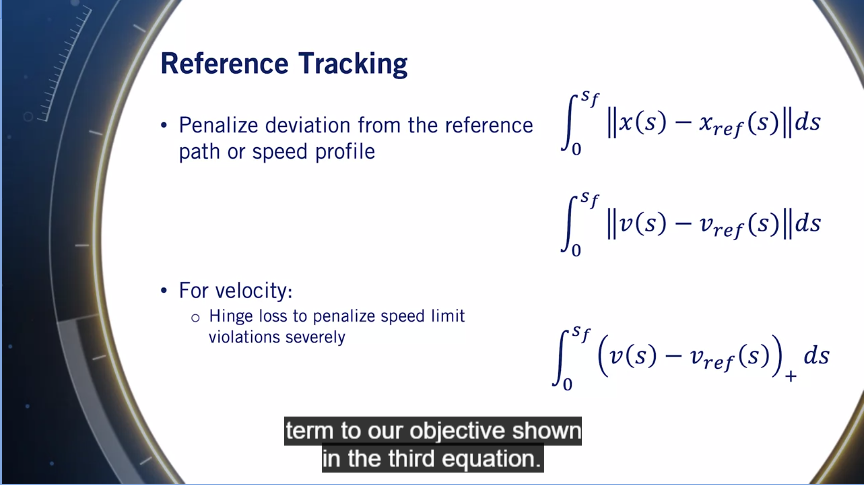
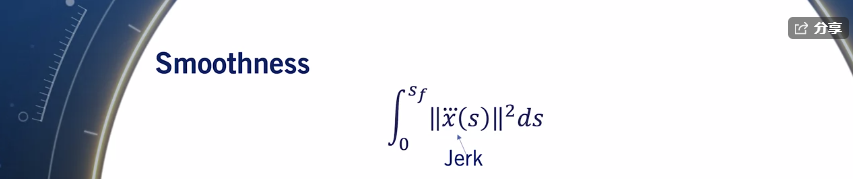
Lesson 3: Objective Functions for Autonomous Driving
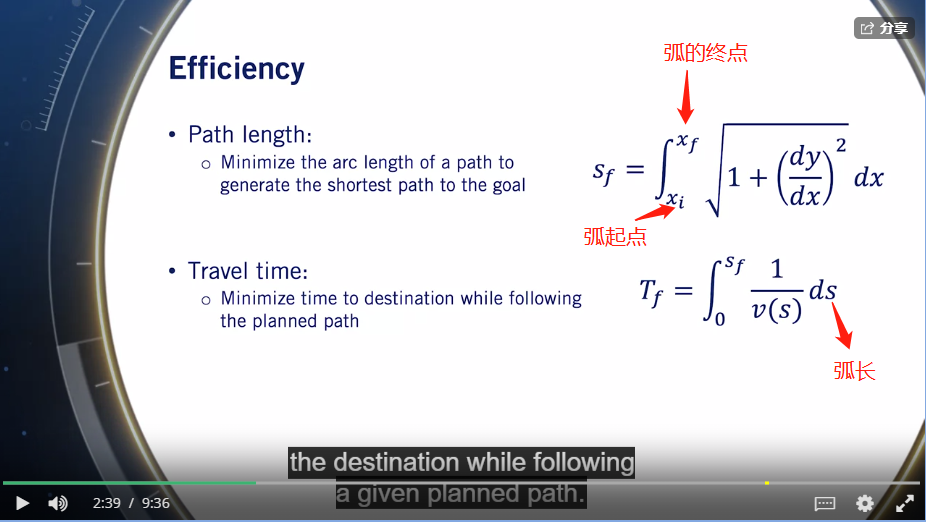
- 曲率
既要保持速度,又让乘客舒适
Lesson 4: Hierarchical Motion Planning
分层以后每一层计算会快,但同时每一层会损失其他层的信息。和不分层比存在一个trade off
Mission Planner
地图级别的导航,最短路Dijkstra,A*
Behavioural Planner
Local Planner
产生避免碰撞的路线和舒适的velocity profile,分两部分
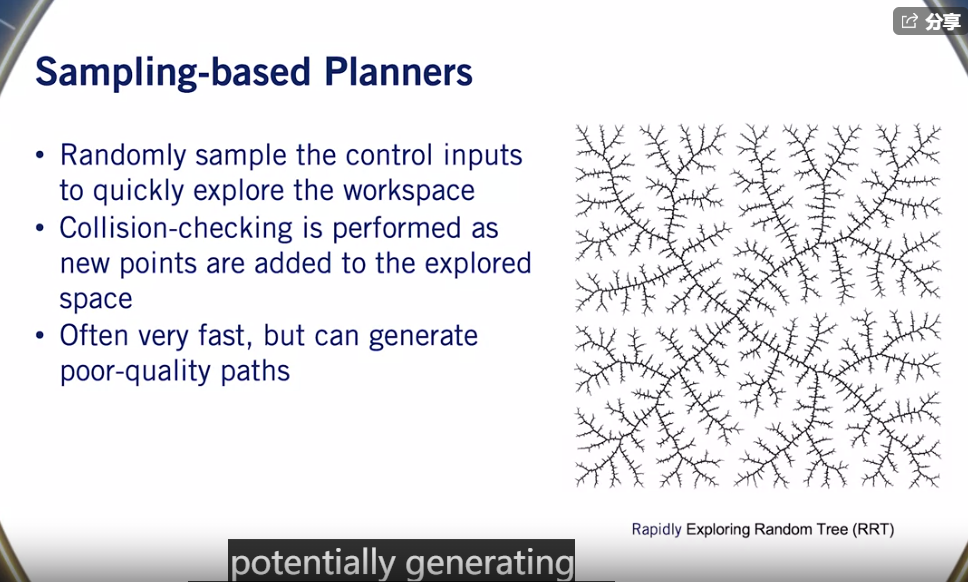
- sampling based planner
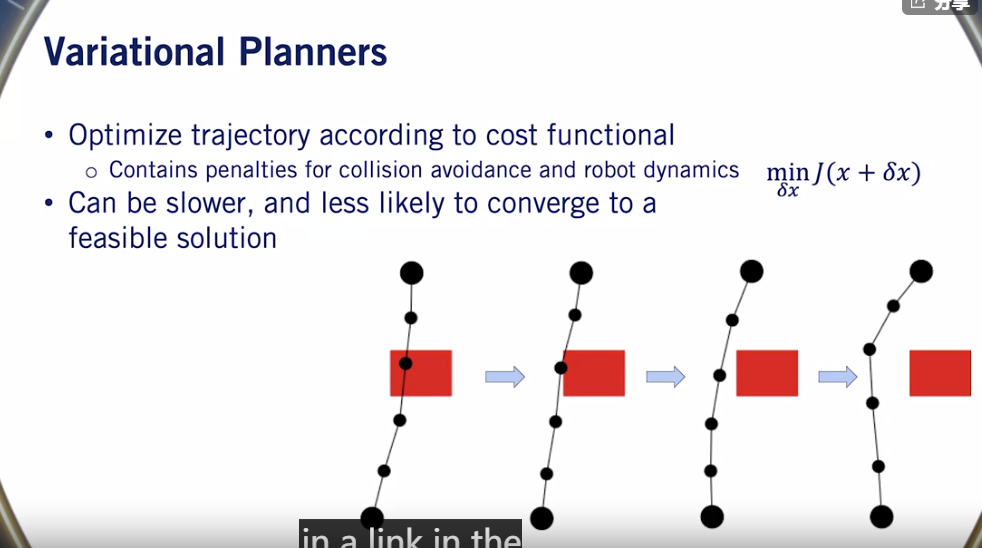
- Variation Planner 将路径和速度产生合并在一起 chomp Algorithm
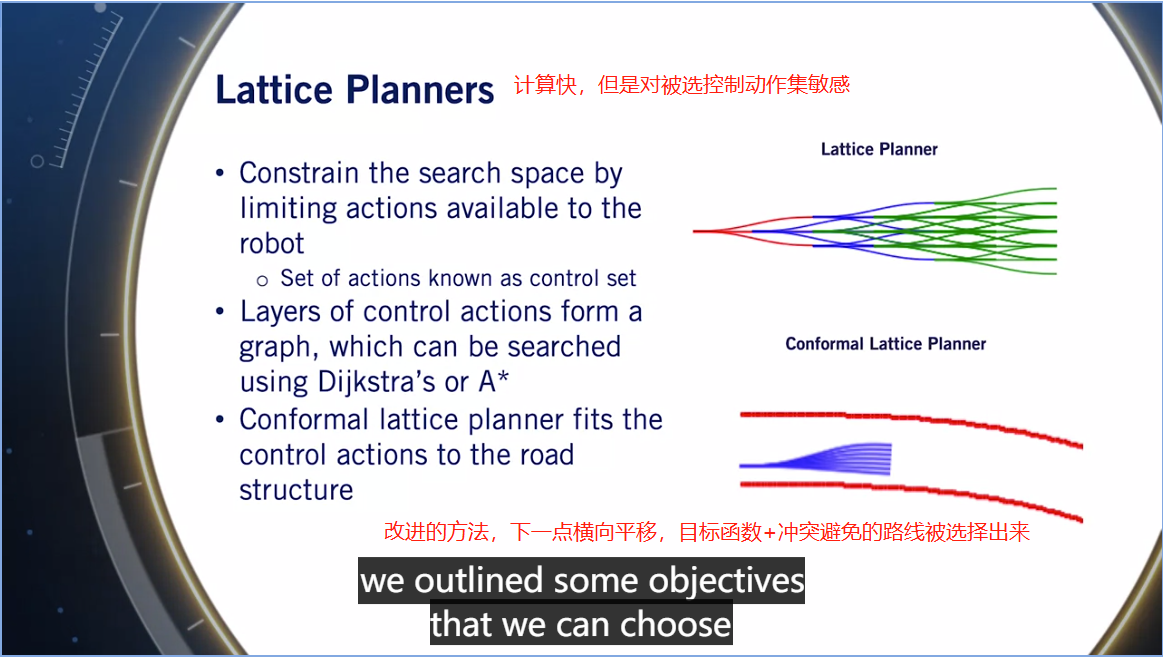
- lattice planner
Lesson 3中对速度的一些优化作为目标限制,凸优化